Welcome to the homepage of the
Mathematical Optimization for Data Science Group
Department of Mathematics and Computer Science, Saarland University, Germany
|
Bilevel Optimization and Automatic Differentiation |
|
The bilevel optimization problems that we consider are constrained minimization
problems (upper level), where the constraint set is given as the set of
solutions to another optimization problem (lower level), which depends on the
upper level's optimization variable. In the context of computer
vision or machine learning, bilevel optimization problems can be seen as a
formalization of a parameter learning problem. The optimization variable is a
parameter (vector) and the objective of the upper level is a loss
function, which seeks to minimize the discrepancy between the solution of an
energy minimization problem and some ground truth data for a given parameter.
In general, bilevel optimization problems are hard to solve, and this is particularly true in the context of machine learning and computer vision. The reason for this is that, on the one hand, the data is usually high-dimensional (often also the parameter vector is high-dimensional) and, on the other hand, the energy minimization problems in the lower level are often naturally non-smooth. In this research project, we aim to solve and understand such bilevel optimization problems. Moreover, a successful approximation strategy is the substitution of the lower level problem by an iterative (unrolled) algorithm for solving this problem. Using gradient based optimization for the overall bilevel problem comes down to efficiently computing the sensitivity of the solution mapping or, in the case of unrolled algorithms, the derivative of the unrolled iterative process. This process is known as Automatic Differentiation or, in Machine Learning context, Backpropagation. Key challenges are the memory efficiency of automatic differentiation and the convergence of the derivative sequence to the true derivative of the solution mapping of the lower level problem. Partially funded by the German Research Foundation (DFG Grant OC 150/4-1). | ||||
| Our Contribution: | ||||
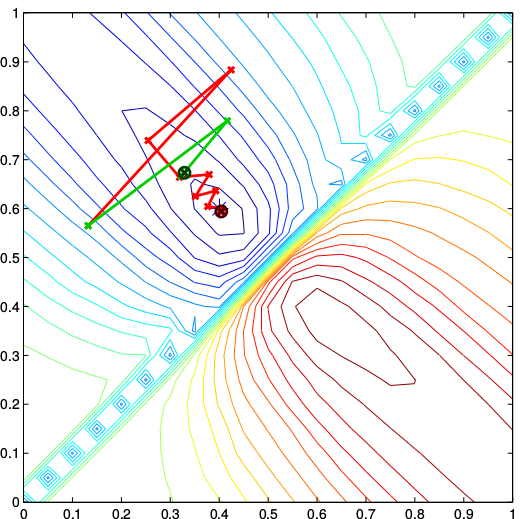
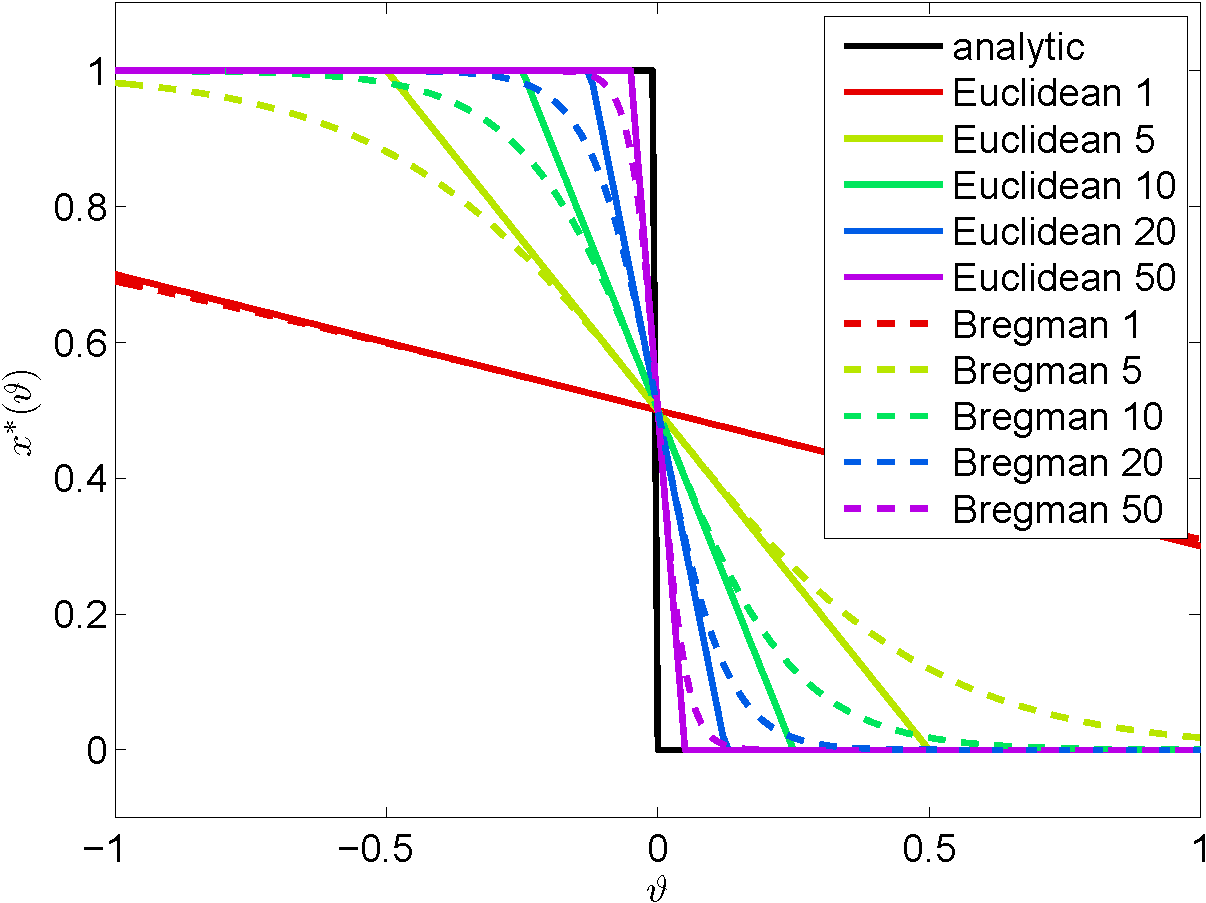
The complexity of such bilevel optimization problems restricts us to local optimization methods. Moreover, the high dimensionality prohibits the usage of higher order information, and we have to apply first-order optimization schemes. However, gradient-based algorithms require a certain degree of smoothness of the objective function, which heavily relies on the smoothness of the lower level's solution mapping. We developed a strategy to approximate the lower level with a smooth iterative algorithm, which represents the non-smooth lower level problem exactly in the limit. Using this strategy, we solve a problem that is closer to the original problem than previous approaches. | ||||
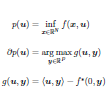
On the trace of non-smooth structures for which classic derivatives can be estimated, the value function is investigated, which appears in applications in Machine Learning such as structured support vector machines, matrix factorization and min-min or minimax problems in general. The objective of a parameteric optimization problem can be differentiated efficiently using convex duality. Connecting this idea with the dual optimization problem leads to efficient algorithms and convergence rates for computing these derivatives. | ||||
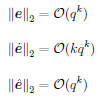
Since the convergence of the derivative through the iteration maps of an algorithm is not very well understood, we revisit the convergence of derivatives obtained by Automatic Differentiation for smooth optimization algorithms. In particular, we show that the accelerated rate of convergence of the Heavy-ball method for smooth strongly convex optimization problems is reflected in an accelerated rate of convergence for the sequence of derivatives computed by AD of through the algorithm's update steps. | ||||
Going one step further, we analyze the derivative sequence for non-smooth lower level problems with the additional property of partial smoothness [Lewis02] A.S. Lewis: Active sets, nonsmoothness, and sensitivity. SIAM Journal on Optimization 13(3):702-725, 2002. . This favorable property is widely present in problems in machine learning and computer vision and has already led to deep insights of the behavior of first-order algorithms. Key is an identification result that states that the solution lies on a manifold and the algorithm identifies this manifold after a finite number of iterations and converges to the solution along the manifold (usually with a linear rate of convergence) [LFP17] J. Liang, J. Fadili, and G. Peyre: Activity identification and local linear convergence of forward-backward-type methods. SIAM Journal on Optimization 27(1):408-437, 2017. . For limit points that satisfy a certain non-degeneracy assumption, we prove convergence, including a linear convergence rate, for the sequence of derivatives that is generated along accelerated proximal gradient descent. | ||||
Numerous Optimization Algorithms have a time-varying update rule thanks to, for instance, a changing step size, momentum parameter or, Hessian approximation. In this paper, we apply unrolled or automatic differentiation to a time-varying iterative process and provide convergence (rate) guarantees for the resulting derivative iterates. We adapt these convergence results and apply them to proximal gradient descent with variable step size and FISTA when solving partly smooth problems. We confirm our findings numerically by solving l1 and l2-regularized linear and logistic regression respectively. Our theoretical and numerical results show that the convergence rate of the algorithm is reflected in its derivative iterates. |
![[pdf]](/images/pdf_14x14.png)
MOP Group
©2017-2025
The author is not
responsible for
the content of
external pages.