Welcome to the homepage of the
Mathematical Optimization for Data Science Group
Department of Mathematics and Computer Science, Saarland University, Germany
|
Inertial Algorithms for Non-smooth Non-convex Optimization |
|
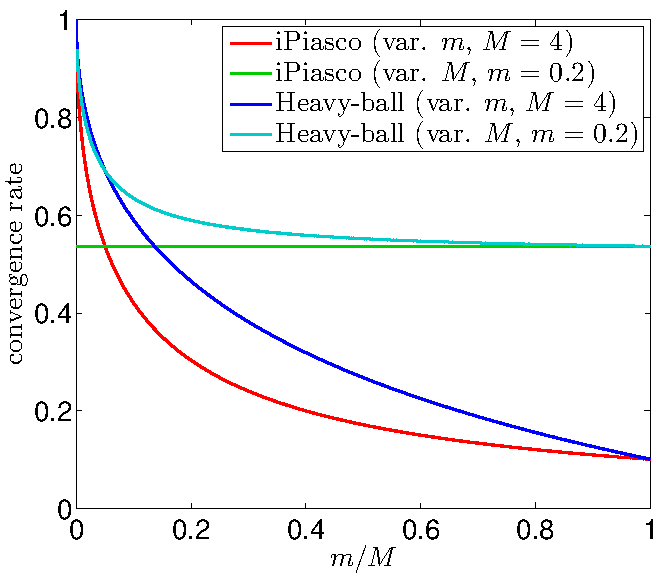
The inertial algorithms that we study are motivated from physics, namely from a dynamical system that describes the behaviour of a ball that is rolling down a surface subject to friction (also known as heavy-ball dynamical system). The motion of the ball accelerates due to inertia. In analogy to that, the considered algorithms generate a sequence of points that accelerates when it moves in the same direction as before. A classic method for smooth unconstrained optimization problems is the Heavy-ball method. It was introduced by Polyak in 1964 in a paper with the title "Some methods of speeding up the convergence of iteration methods"
[Polyak64]
B.T. Polyak: Some methods of speeding up the convergence of iteration methods.
USSR Computational Mathematics and Mathematical Physics 4(5):1--17, 1964.
,
which suggests an improved performance of inertial algorithms. The global convergence of the Heavy-ball method for non-convex problems was studied by Zavriev and Kostyuk
[ZK93]
S.K. Zavriev and F.V. Kostyuk:
Heavy-ball method in nonconvex optimization problems.
Computational Mathematics and Modeling 4(4):336--341, 1993.
.
For the mechanical interpretation, we refer to
[AGR00]
H. Attouch, X. Goudou, and P. Redont:
The heavy ball with friction method, i. the continuous dynamical system: global exploration of the local minima of a real-valued function by asymptotic analysis of a dissipative dynamical system.
Communications in Contemporary Mathematics 2(1):1--34, 2000.
.
In convex optimization the Heavy-ball method and its variations have led to the study of so-called accelerated schemes and optimal methods [Nesterov04] Y. Nesterov: Introductory lectures on convex optimization: A basic course. Applied Optimization, vol. 87, Kluwer Academic Publishers, 2004. , which refers to algorithms with a theoretical worst-case complexity that is of the same order as the lower complexity bound for a certain class of problems. This topic is still actively researched. | ||||||
| Our Contribution: | ||||||
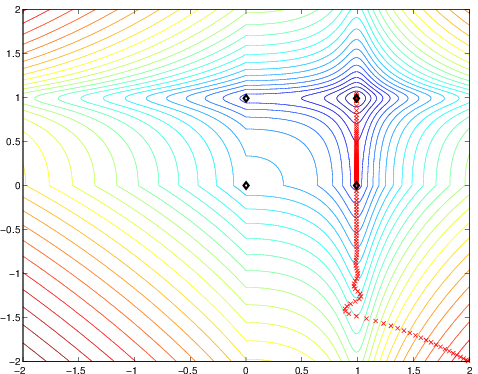
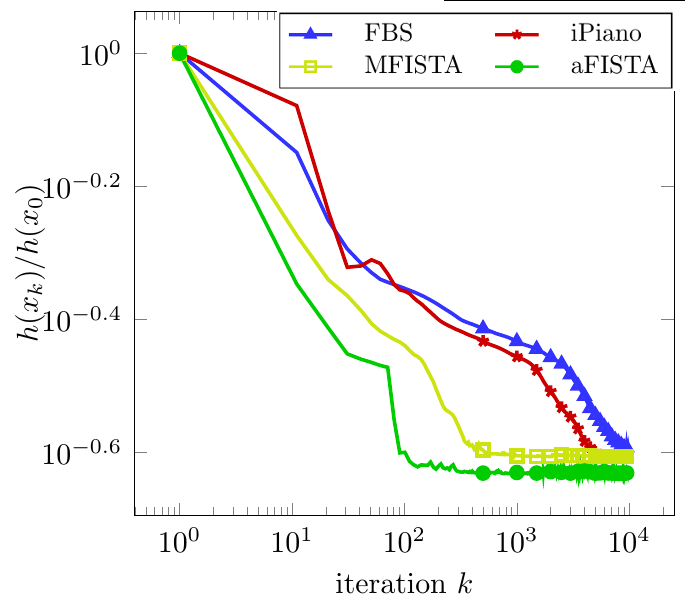
We extended the applicability of the Heavy-ball method from smooth unconstrained optimization to a class of non-smooth non-convex optimization problems: problems that are the sum of a continuously differentiable function with Lipschitz continuous gradient and a non-smooth non-convex extended-valued function with a simple proximal mapping. The algorithm was termed iPiano. We proved global subsequential convergence of the algorithm to a stationary point. Moreover, this is the first work that proves global convergence of an inertial algorithm for non-smooth non-convex optimization problems. This global convergence result is holds for objective functions that satisfy the so-called Kurdyka--Lojasiewicz inequality. This is a mild assumption that is satisfied by most of the functions in practical applications. iPiano has shown state-of-the-art performance for several problems from image processing. | ||||||
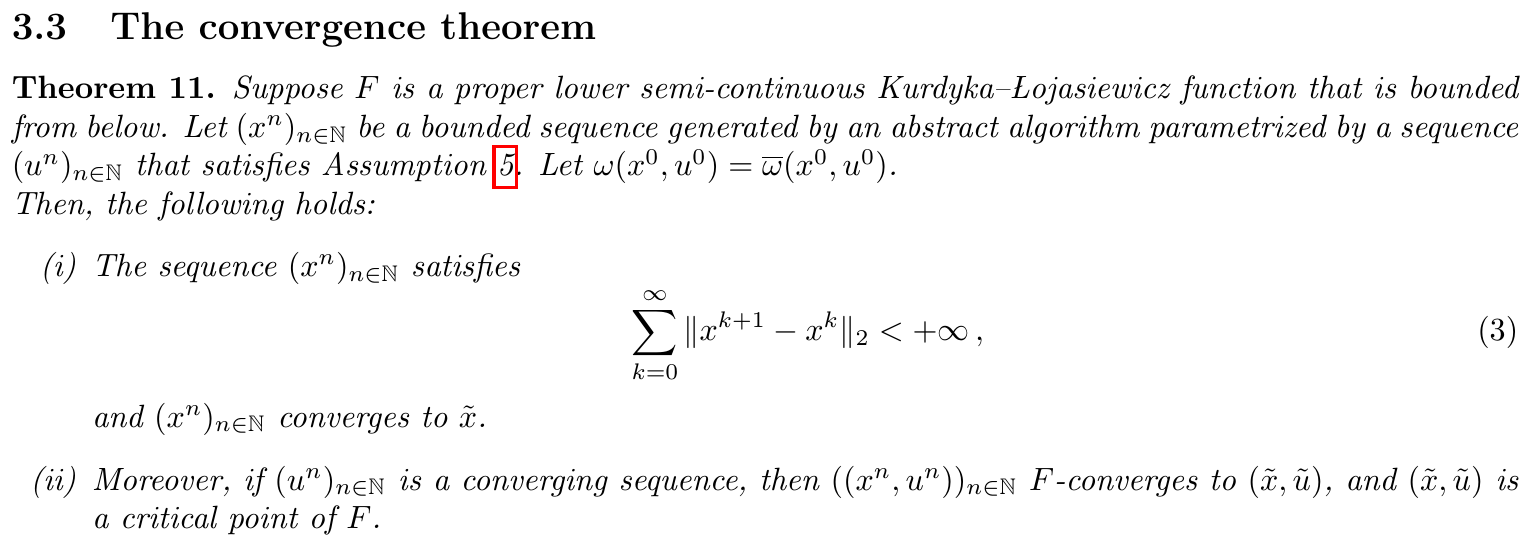
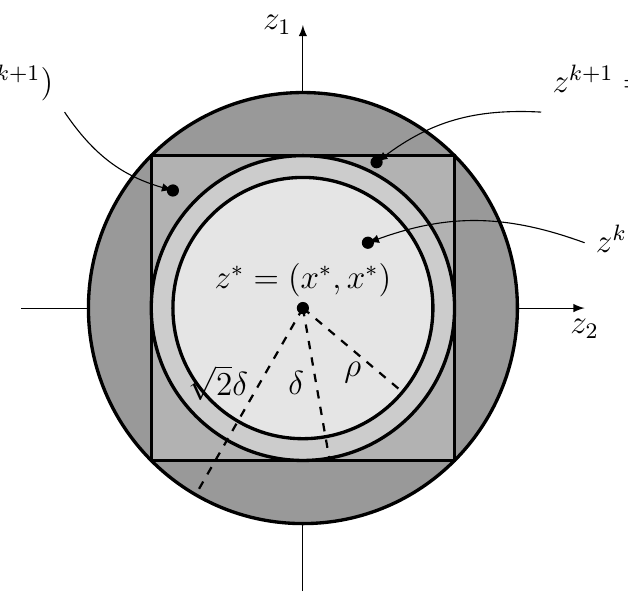
The contribution of this work is twofold: The first one is a unification of abstract convergence theorems for Kurdyka--Lojasiewicz functions. The second one uses the abstract convergence results to derive a block coordinate and variable metric variant of iPiano. | ||||||
We studied the local convergence of iPiano for a class of so-called prox-regular functions. The local convergence result shows an equivalence of iPiano to inertial alternating/averaged proximal minimization/projection methods and therefore allowed us to tranfer the convergence results to these algorithms. Key is a formula for prox-regular functions that expresses the gradient of the Moreau envelope using the proximal mapping, which is well known in the convex setting. | ||||||
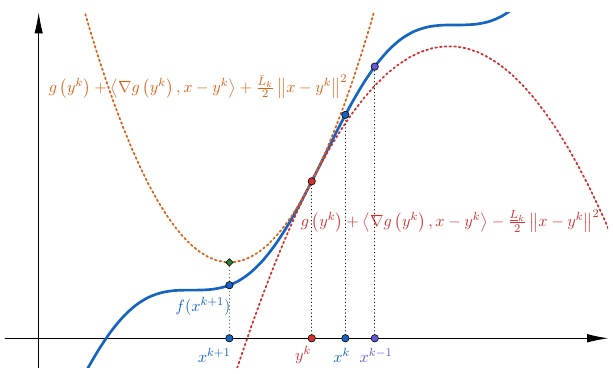
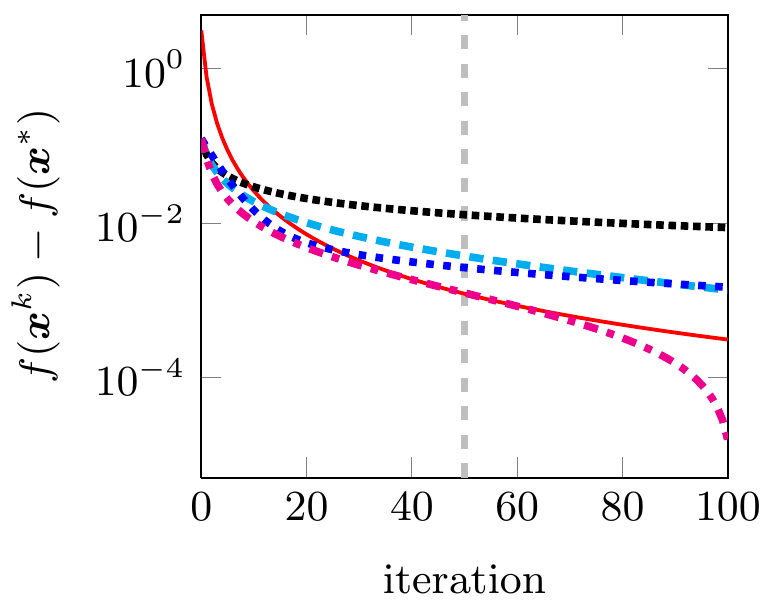
The inertial algorithm with Nesterov-like extrapolation and Bregman distances proposed in this work is significant due to several reasons: (i) We introduce a novel convex concave inertial (CoCaIn) backtracking strategy. Key is the observation that the use of inertia is closely connected to certain lower bound estimates of the objective function---non-inertial methods only rely on certain simple upper bounds. Intuitively, the algorithm adapts to the "local convexity" of the objective via an efficient backtracking strategy. (ii) The algorithm shows state-of-the-art performance on several problems from Machine Learning and Computer Vision. (iii) We present the first global convergence result for an inertial algorithm with Bregman distances to a stationary point for Kurdyka--Lojasiewicz functions. | ||||||
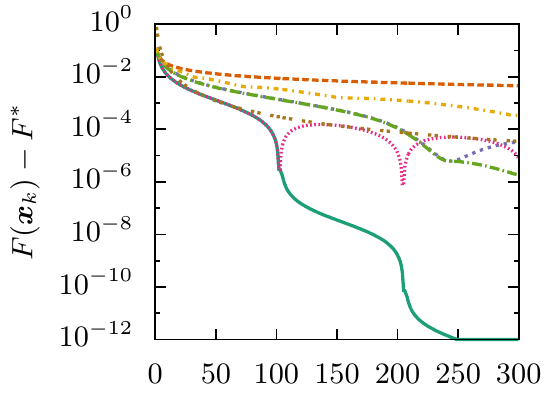
This work establishes a close connection between inertial algorithms and quasi-Newton methods. In particular, using a certain optimized extrapolation step, the SR1 quasi-Newton method can be recovered. Thanks to recent results on proximal calculus with respect to a rank-1 modified metric [BF12] S. Becker and J. Fadili: A Quasi-Newton Proximal Splitting Method. In Proceedings of the 25th International Conference on Neural Information Processing Systems (NIPS), 2618--2626, 2012. and the extension to proximal calculus for a rank-r modified metric, the resulting update step in Adaptive FISTA can be computed efficiently also for non-smooth non-convex additive composite problems. | ||||||
|
The following works contribute to inertial algorithms in the convex setting.
|
![[pdf]](/images/pdf_14x14.png)
MOP Group
©2017-2025
The author is not
responsible for
the content of
external pages.